A white piece of equipment was “climbing” a round tube. With its body part stretching and contracting like inchworms, it inched forward freely and even passed a 90-degree angle successfully.
The equipment is actually aone-piece 3D-printed pipe-climbing robot composed of sequenced novel soft bending mechanisms, developed by Prof. Zuo Siyang and Dr. Liu Jianbin’s research team at Tianjin University. It is capable of scaling and monitoring pipes at industrial facilities in real-time.
In industrial production, current pipe-climbing robots can replace humans in real-time monitoring, leak inspection, and other tasks.However,they tend to be either inner or outer pipe-climbing devices, not both. What’s more,most of themare designed for specific applications with complex structures, limiting theiradaptability to various conditions.
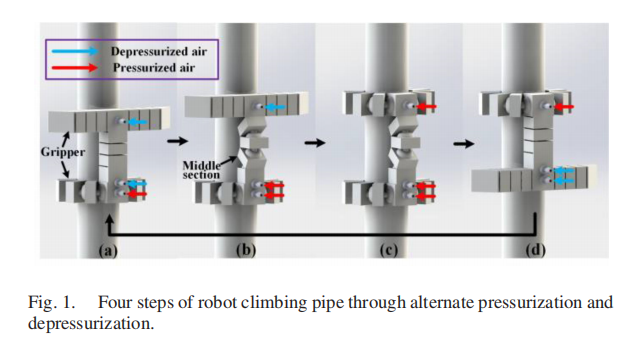
TJU researchers designed their robot witha one-piece soft bending mechanismthatusesthe small strains of soft materials to achieve large bending deformation.It has a middle section with grippers at either end, and three intake pipes,allowing it to be controlled and apply pressure on-demand.
“To trigger off a‘climbing’ motion, we only need toalternately pressurizeand depressurizethe device’s grippers,and the motion is under our direct control” said Dr. Liu Jianbin, adding that they used CADsoftware to create themodule-designeddeviceso as to make it easy to be upgraded, “We can add modules or adjust the diameter of the device’s grippers at will.”
The proposed robot istested to be capable of climbing both internally and externally, androtating in longitudinal directions. It ishighly adaptable to pipes with various diameters, radii of curvature, inclinations, and even outerandinner walls. The robot also boasts of a largestatic bearing ability of 1000gthat isalmost 80 times its weight.
In future, the scientists intend to integrate sensors into their device, allowing it to become an autonomous pipe maintenance solution.
By Eva Yin
